Outline¶
- Solutions of state space representations: Why study linear systems?
- Continuous system
- Discrete system
- Numerical solution
- Examples
- Conclusion
Solutions of state space representations: Linear systems¶
- Solution method for one linear system applies to all other linear systems. Solution for one nonlinear system, typically does not apply to other nonlinear systems.
- Closed form solution can be obtained for linear systems, which allows us to draw inferences about the behavior of the system
- Closed form solution allows us to test if the underlying process is controllable and observable (to be discussed in the next class).
- Linear systems formulation gives formal techniques to characterize the unstable modes and design controller to cancel those nodes.
- Almost all systems under sufficiently stringent conditions can be approximated as linear system.
Solutions of state space representations: 1st order continuous system¶
Consider the system given by,
$$ \dot{x} = a x, $$where \( a \) is a scalar.
Solve for \(x (t) \), given the initial condition \( x_o \)
Solutions of state space representations: Continuous system¶
System:
$$ \frac{d x(t) }{dt} = A x(t) + B u(t) $$Special case, \( u = 0 \)¶
$$ \frac{d x(t) }{dt} = A x(t) $$Claim: Solution is
$$ x(t) = e^{At} x_o $$Verify by substitution
$$ \frac{d x(t) }{dt} = \frac{d e^{At} }{dt}x_o $$Recall
$$ e^{At} = \left ( I + At + \frac{A^2t^2}{2!} + \frac{A^3t^3}{3!} + \dots \right) $$ $$ \frac{de^{At}}{dt} = \left ( A + 2 \frac{A^2 t}{2!} + 3 \frac{A^3 t^2}{3!} + \dots \right) = \left ( A + \frac{A^2 t}{1!} + \frac{A^3 t^2}{2!} + \dots \right) $$ $$ \frac{de^{At}}{dt} = A \left ( I + At + \frac{A^2t^2}{2!} + \frac{A^3t^3}{3!} + \dots \right) = A e^{At}$$Therefore, $$ \frac{d x(t) }{dt} = \frac{d e^{At} }{dt}x_o =A e^{At} x_o = A x(t)$$
General solution: 1st order continuous system¶
Consider the system given by,
$$ \dot{x} = a x + bu, $$where \( a \) is a scalar.
Solve for \(x (t) \), given the initial condition \( x_o \)
General solution: Continuous system¶
$$ \frac{d x(t) }{dt} = A x(t) + B u(t)$$with initial condition \( x_o \).
General solution is of the form¶
$$x(t) = e^{At} c(t)$$Substituting in \( \dot{x} = Ax + Bu \)
$$ A e^{At} c(t) + e^{At} \frac{d c }{dt} = A e^{At} c(t) + B u(t), $$Simplifying and rearranging,
$$ \frac{d c }{dt} = e^{-At} B u(t). $$Integrating with respect to time,
$$ c(t) = \int_{0}^{t} e^{-A \lambda } B u(\lambda) d\lambda + constant. $$General solution: Continuous system¶
$$ \frac{d x(t) }{dt} = A x(t) + B u(t)$$with initial condition \( x_o \).
Solution:
$$x(t) = e^{At} \int_{0}^{t} e^{-A \lambda } B u(\lambda) d\lambda + constant. $$Using \( x(0) = x_o \),
$$x(t) = x_o + e^{At} \int_{0}^{t} e^{-A \lambda } B u(\lambda) d\lambda. $$Solution for continuous system¶
$$x(t) = x_o + e^{At} \int_{0}^{t} e^{-A \lambda } B u(\lambda) d\lambda. $$- If the eigen values of A have positive real parts, then the system's is unstable and goes to infinity along the directions given by the corresponding eigenvectors.
- If the eigen values of A have negative real parts, the solution goes to 0 asymptotically.
- CAUTION: In MATLAB, DO NOT USE exp(A) to solve for exponential of a matrix, USE expm(A) instead.
- Control \( u \) can be chosen to make the effective eigen values of the system negative. This process is also called pole placement.
Solutions of state space representations: 1st order discrete system¶
Consider the system given by
$$ x[k+1] = a x[k] $$Solve for \(x[k]\) given the initial condition \(x_o \).
When u[k] = 0¶
When $u[k] = 0$, the system dynamics reduces to,
$$ x[k+1] = A x[k] $$with initial condition \( x[0] = x_o \).
Claim, solution is,
$$ x[k] = A^{k} x_o$$Verify by substitution,
$$ x[k+1] = A^{k+1} x_o = A (A^{k}x_o) = A x[k]. $$General case: 1st order discrete system¶
Consider the system given by,
$$ x[k+1] = a x[k] + bu[k], $$where \( a \) is a scalar.
Solve for \(x[k] \), given the initial condition \( x_o \)
General case: Discrete system¶
$$ x[k+1]=Ax[k] + B u[k]$$with initial condition x[0]=xo.
Claim, solution is, $$ x[k] = A^{k} x[0] + \sum_{i=0}^{k-1}A^{k-i-1} B u[i] $$
Verify by substitution
$$ x[k+1] = A \left( A^{k} x[0] + \sum_{i=0}^{k-1}A^{k-i-1} B u[i] \right) + B u[k] = A^{k+1} x[0] + \sum_{i=0}^{k-1}A^{k-i} B u[i] + B u[k]$$$$ x[k+1] = A^{k+1} x[0] + \sum_{i=0}^{k}A^{k-i} B u[i]$$with initial condition x[0]=xo.
$$ x[k] = A^{k} x[0] + \sum_{i=0}^{k-1}A^{k-i-1} B u[i] $$Properties,
- The solution for $x[k]$ depends only on the control signals between 0 and current time instant (k).
- The solutions for $x[k]$ are bounded if $A^{k}$ is bounded is no longer valid, because the solution depends on $B$ and control history $u[k]$ also.
Relation between continuous and discrete representations¶
$$ \frac{d x(t) }{dt} = A x(t) + B u(t) $$$$ y(t) = C x(t) + D u(t).$$Discretize the continuous system $$\frac{x[t+\Delta t] - x[t]}{\Delta t} = A x(t) + B u(t) $$
$$x[t+\Delta t] = (I+ A \Delta t) x(t) + B\Delta t u(t) $$If all the eigen values of $A$ have negative real parts, then the eigen values of $(I+ A \Delta t)$ for a small $\Delta t$ are have real parts less than 1, and $e^{At}$ or $(I+ A \Delta t)^k$ both will converge to $0$ as $t,k \rightarrow \infty $.
Solutions of state space representations: Numerical¶
It is not always possible to obtain a closed form solution, in such cases numerical methods are employed.
Example: Consider the system \( \dot{x} = a x \) discretized as,
$$ x[k+1] = (1+a \delta t ) x[k] $$Recall, \( \dot{x} = a x \)'s solution is \( x(t) = x(0)e^{at} \)
clc;close all;clear all
a = -1;x(1) = 1; % x(0)
dt = .2;t(1) = 0;t_f = 2;
N = round(t_f/dt);
for i = 2:N+1
t(i) = t(i-1) + dt;
x(i) = (1+a*dt)*x(i-1);
end
figure;
plot(t,x,'ro',t,exp(a*t),'ks')
hold on
plot(t,x,'r',0:.01:t_f,exp(a*(0:.01:t_f)),'k')
ylabel('x');xlabel('t')

Numerical solutions: Effect of changing dt.¶

Numerical solutions: Practical guidelines¶
- Using smaller 'dt' results in more accurate solution. However, most systems do not have closed form solutions, so we choose a small 'dt'.
- In practice keep reducing 'dt' by a factor of 2 until no significant change in the solution occurs.
- Use other numerical techniques to discretize and integrate the system. For example, trapeziod, central difference, Fourth-order Runge-Kutta method to discretize the system.
- Use ode45 in MATLAB to obtain numerical solutions.
- You can also solve the equations in linear case directly using expm function on the system dynamics matrix A.
clc;close all;clear all
a = -1;x0 = 1; % x(0)
t_f = 2;
sys_fun = @(t,x)( a * x);
[t,x] = ode45(sys_fun,[0 t_f],x0);
figure;
plot(t,x,'ro',t,exp(a*t),'ks')
hold on;
plot(t,x,(0:0.01:t_f),exp(a*(0:0.01:t_f)),'k')
ylabel('x')
xlabel('t')
title('Solution from ODE45')

State space solution: Numerical for nonlinear systems¶
For most nonlinear systems, numerical methods are the only way to obtain solution. In such cases, always use higher order integration method such as ode45.
State-space representation:¶
$$ \dot{y}_1 = y_2 $$$$ \dot{y}_2 = \mu (1 - y_1^2) y_2 - y_1 $$clc;close all;clear all
mu = 1;
vdp = @(t,y)[y(2); mu*(1-y(1)^2)*y(2)-y(1)];
[t,y] = ode45(vdp,[0 10],[2; 0]);
plot(t,y(:,1),'-o',t,y(:,2),'-o')
title('Van der Pol solution with ODE45');
xlabel('t');
ylabel('y');
legend('y_1','y_2')

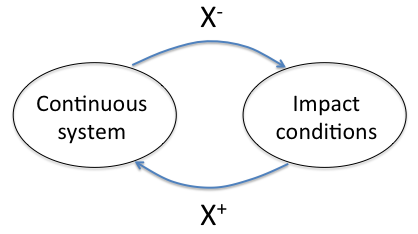
Example: Hybrid system, Bouncing ball¶
Equations of motion of bouncing ball are given by,
$$ \dot{x} = v_x $$ $$ \ddot{y} = -g $$At impact with ground, the velocity changes as,
$$ \dot{y}^+ = -0.9 \dot{y}^- $$This is a hybrid system that involves a continuous time formulation for when the ball is in the air, and a discrete time-type of formulation for impact.
Solution procedure : ODE45 with hybrid conditions,¶
% System dynamics
function dx = eqn_bouncing_ball(t,x,g,vx)
x1 = x(1);
x2 = x(2);
x3 = x(3);
dx1 = vx;
dx2 = x(3);
dx3 = -g;
dx = [dx1;dx2;dx3];
% Impact condition
function [value, isterminal, direction] = hit_event(t,x)
% value of variable to keep track of
% isterminal, 1 to stop, 0 otherwise.
% direction,
% 0- all zeros of the solution
% 1- only zeros where the event function is increasing
% -1 - only zeros where the event function is decreasing
value = x(2);
isterminal = 1; %
direction = -1; % decreasing
clc;close all;clear all;
vx = .2;vy = 1;g = 9.81;
options = odeset('Events',@hit_event, 'RelTol',1e-8,'AbsTol',1e-10);
x_0 = [0;0;vy];
t_start = 0;
X_all = [];t_all = [];
for i = 1:10;
% Integrating continuous system until impact
[t,X] = ode45(@(t,x)eqn_bouncing_ball(t,x,g,vx), [t_start:0.01:t_start+10],x_0,options);
X_all = [X_all ; X];
t_all = [t_all; t];
% Impact condition
x_0 = X_all(end,:);
x_0(3) = -0.9*x_0(3);
t_start = t(end);
end
ODE45 for bouncing ball
Conclusion¶
- Solutions of state space representations: Why study linear systems?
- Continuous system
- Discrete system
- Numerical solution
- Examples