Overview¶
- Nonlinear systems have very complex dynamics
- Nonlinear systems can be approximated as linear system under special cases
- In such cases, control based on linear scheme can provide stable results.
Control synthesis: General case¶
Consider the system given by,
$$ \dot{X} = f(X,u) $$Compute desired trajectory (GPOPS II, or other SW).
$$ \dot{X_d} = f(X_d, u_d) $$where \(d \) denotes desired trajectory. Taking error between the true and desired system dyanmic equations gives,
$$ \dot{X} - \dot{X_d} = f(X,u) - f(X_d,u_d) $$Defining \( e = X - X_d \) and \( \delta u = u - u_d \) , gives
$$ \dot{e} = f(X_d+e,u_d+\delta u) - f(X_d,u_d) $$Taking Taylor series expansion about \(X_d\) gives,
$$ \dot{e} = f(X_d,u_d) + \left. \frac{\partial f}{ \partial X} \right|_{X_d,u_d} e + \left. \frac{\partial f}{ \partial u} \right|_{X_d,u_d} \delta u - f(X_d,u_d) + H.O.T $$Where HOT stands for higher order terms. Ignoring the higher order terms gives,
$$ \dot{e} = \left. \frac{\partial f}{ \partial X} \right|_{X_d,u_d} e + \left. \frac{\partial f}{ \partial u} \right|_{X_d,u_d} \delta u$$where,
$$ A_d = \left. \frac{\partial f}{ \partial X} \right|_{X_d,u_d} $$$$ B_d = \left. \frac{\partial f}{ \partial u} \right|_{X_d,u_d} $$Final control law,
$$ u = u_d + \delta u $$Control synthesis for robotic applications¶
$$ M (q) \ddot{q} + C(q,\dot{q}) \dot{q} + G(q) = \tau $$- \( M(q) \) for robots is always invertible.
The expression above can be linearized about a desired trajectory as,
$$ \ddot{\delta q} = \ddot{q} - \ddot{q}_d \approx \left. \frac{\partial M(q)^{-1} ff}{ \partial q} \right|_{(q_d,\dot{q_d},\tau_d)} \delta q + M(q_d)^{-1} \left. \frac{\partial ff}{ \partial \dot{q}} \right|_{(q_d,\dot{q_d},\tau_d)} \delta \dot{q}+ M(q_d)^{-1} \left. \frac{\partial ff}{ \partial \tau} \right|_{(q_d,\dot{q_d},\tau_d)} \delta \tau$$where,
$$ \left( \left. \frac{\partial M(q)^{-1} }{ \partial q} \right|_{(q_d,\dot{q_d},\tau_d)} \circ ff \right) $$is a tensor product between derivative of inverse of \( M(q) \) and \( ff \). Illustration here. The derivative of the inverse of mass matrix can be computed as,
$$ \frac{\partial M(q)^{-1} }{ \partial q} = - M(q)^{-1} \frac{\partial M(q)}{\partial q} M(q)^{-1} $$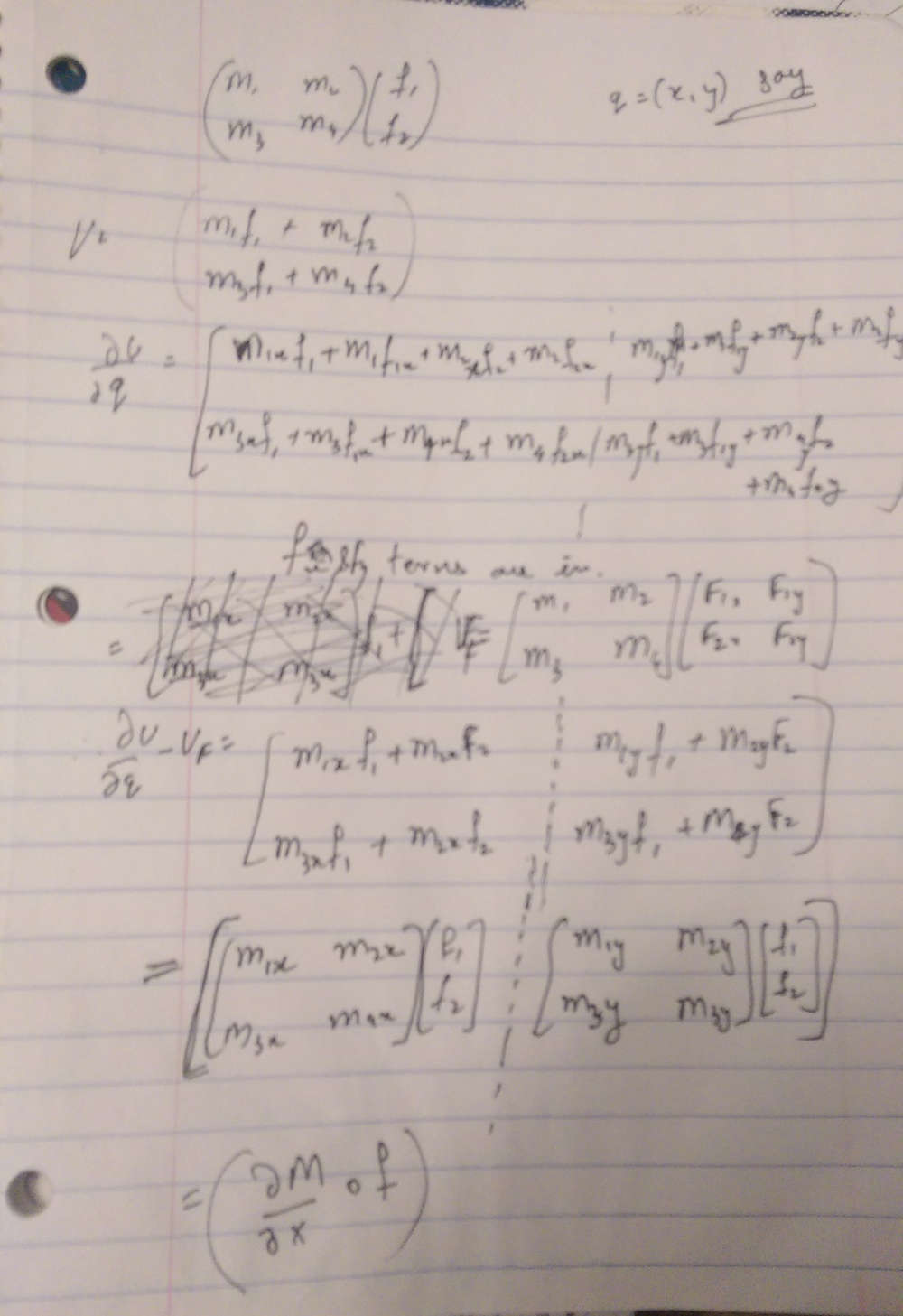{kind=link}
and
$$ ff(q,\dot{q},\tau) = (\tau - C(q,\dot{q}) \dot{q} - G(q)), $$Considerations¶
- Discretized dynamics is not true dynamics, and may be uncontrollable for some combinations of state variables.
- As desired trajectory is computed under some simplifying assumptions, the desired trajectory neednt follow the true dynamics.
- Applying a high-gain control about desired trajectory results in good tracking performance of the controller.
Trajectory generation using GPOPS II¶
- Define continuous dynamics using derived Equations of motion.
- Define end constraint (cost)
- Define bounds on variables.
- Use GPOPS to compute sub-optimal solution and use it as trajectory to track.
Cart-pole example (MATLAB demo)¶
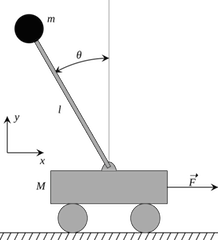
We will test the effectiveness of linearizing control by testing the performance of the controller on following 3 tasks,
- Stabilize the pendulum about the vertical position.
- Apply Linear Quadratic Regulator (LQR) to drive the error between the desired and true state to 0.
- Apply control to move the pendulum from downward position \(x = 0, \theta = pi\) to upright position \( x = 0,\theta = 0\).
Dynamics of cart pole function dq = dynamics_cartpole(t,q)
model_params;
x = q(1);
th = q(2);
dx = q(3);
dth = q(4);
% Generating control based on linearized system:
x_d = 0;
th_d = 0;
dx_d = 0;
dth_d = 0;
u_f_d = 0;
ff_d = ff_cartpole(x_d,th_d,dx_d,dth_d,m_cart,m_mass,l,u_f_d,g);
M_d = M_cartpole(x_d,th_d,dx_d,dth_d,m_cart,m_mass,l,u_f_d,g);
dMdq_d = dMdq_cartpole(x_d,th_d,dx_d,dth_d,m_cart,m_mass,l,u_f_d,g);
dfdq_d = dfdq_cartpole(x_d,th_d,dx_d,dth_d,m_cart,m_mass,l,u_f_d,g);
dfd_dq_d = dfd_dq_cartpole(x_d,th_d,dx_d,dth_d,m_cart,m_mass,l,u_f_d,g);
dfdu_d = dfdu_cartpole(x_d,th_d,dx_d,dth_d,m_cart,m_mass,l,u_f_d,g);Dynamics of cart pole (contd.)
[A_lin,B_lin] = get_linearized_system(dMdq_d,dfdq_d,dfd_dq_d,dfdu_d,M_d,ff_d);
Q = 10*diag([1 1 1 1]);
R = 0.001;
P = care(A_lin,B_lin,Q,R); % Generate control based on linearized system
K = inv(R)*B_lin'*P;
u_f = -1*K*q;
ff = ff_cartpole(x,th,dx,dth,m_cart,m_mass,l,u_f,g);
M = M_cartpole(x,th,dx,dth,m_cart,m_mass,l,u_f,g);
ddq = M\ff;
dq = [q(3:4);
ddq];Simulation¶
clc
close all
clear all
q = [0;.1;0;0];
t = 0;
dq = dynamics_cartpole(t,q);
time_span = 0:0.1:8;
[time,states] = ode45(@dynamics_cartpole,time_span,q);Without LQR¶
With LQR¶
Generating desrired (sub-optimal) trajectory with GPOPS II¶
- Make a continuous function with dynamics and path constraints
- Make end-point function with cost
- Set up bounds
- Solve using GPOPS II
dynamics¶
function phaseout = cartPoleContinuous(input);
x_all = input.phase.state(:,1);
th_all = input.phase.state(:,2);
dx_all = input.phase.state(:,3);
dth_all = input.phase.state(:,4);
u_all = input.phase.control(:,1);
dq_all = get_dynamics(x_all,th_all,dx_all,dth_all,u_all);
phaseout.dynamics = dq_all;
phaseout.integrand = u_all.^2;Get Dynamics¶
function dq_all = get_dynamics(x_all,th_all,dx_all,dth_all,u_all)
model_params;
for i = 1:length(th_all);
th = th_all(i);
x = x_all(i);
dth = dth_all(i);
dx = dx_all(i);
u_f = u_all(i);
ff = ff_cartpole(x,th,dx,dth,m_cart,m_mass,l,u_f,g);
M = M_cartpole(x,th,dx,dth,m_cart,m_mass,l,u_f,g);
ddq = M\ff;
dq_all(i,:) = [dx dth ddq'];
endEnd point cartpole¶
function output = cartPoleEndpoint(input)
% input.auxdata.dynamics;
q = input.phase.integral;
tf = input.phase.finaltime;
gamma = input.auxdata.gamma;
output.objective = tf+gamma*q;Bounds¶
% setting up bounds
bounds.phase.initialtime.lower = 0;
bounds.phase.initialtime.upper = 0;
bounds.phase.finaltime.lower = 0.001;
bounds.phase.finaltime.upper = tf;
bounds.phase.initialstate.lower = [x0 th0 dx0 dth0];
bounds.phase.initialstate.upper = [x0 th0 dx0 dth0];
bounds.phase.state.lower = xMin;
bounds.phase.state.upper = xMax;
bounds.phase.finalstate.lower = [xf thf dxf dthf];
bounds.phase.finalstate.upper = [xf thf dxf dthf];
bounds.phase.control.lower = uMin;
bounds.phase.control.upper = uMax;
bounds.phase.integral.lower = 0;
bounds.phase.integral.upper = 100000;Guess¶
rng(0);
xGuess = [x0;xf];
thGuess = [th0;thf];
dxGuess = [dx0;dxf];
dthGuess = [dth0;dthf];
uGuess = [0;0];
tGuess = [0;tf];
guess.phase.time = tGuess;
guess.phase.state = [xGuess,thGuess,dxGuess,dthGuess];
guess.phase.control = uGuess;
guess.phase.integral = 0;
% setup.name = 'cartpole-Problem';
setup.functions.continuous = @cartPoleContinuous;
setup.functions.endpoint = @cartPoleEndpoint;
setup.bounds = bounds;
setup.auxdata = auxdata;
setup.functions.report = @report;
setup.guess = guess;
setup.nlp.solver = 'ipopt';
setup.derivatives.supplier = 'sparseCD';
setup.derivatives.derivativelevel = 'first';
setup.scales.method = 'none';
setup.derivatives.dependencies = 'full';
setup.mesh.method = 'hp-PattersonRao';
setup.mesh.tolerance = 1e-2;
setup.method = 'RPM-Integration';output = gpops2(setup);
output.result.nlptime
solution = output.result.solution;Tracking using same method as before,¶
function dq = dynamics_cartpole(t,q)
model_params;
x = q(1);
th = q(2);
dx = q(3);
dth = q(4);% Generating control based on linearized system:
if (norm(th)<.1 & norm(dth)<1)
x_d = 0;
th_d = 0;
dx_d = 0;
dth_d = 0;
u_f_d = 0;
else
generate_desired_Polynomials;
x_d = ppval(pp_states.x,t);
th_d = ppval(pp_states.th,t);
dx_d = ppval(pp_states.dx,t);
dth_d = ppval(pp_states.dth,t);
u_f_d = ppval(pp_controls.u,t);
endq_d = [x_d;th_d;dx_d;dth_d];
ff_d = ff_cartpole(x_d,th_d,dx_d,dth_d,m_cart,m_mass,l,u_f_d,g);
M_d = M_cartpole(x_d,th_d,dx_d,dth_d,m_cart,m_mass,l,u_f_d,g);
dMdq_d = dMdq_cartpole(x_d,th_d,dx_d,dth_d,m_cart,m_mass,l,u_f_d,g);
dfdq_d = dfdq_cartpole(x_d,th_d,dx_d,dth_d,m_cart,m_mass,l,u_f_d,g);
dfd_dq_d = dfd_dq_cartpole(x_d,th_d,dx_d,dth_d,m_cart,m_mass,l,u_f_d,g);
dfdu_d = dfdu_cartpole(x_d,th_d,dx_d,dth_d,m_cart,m_mass,l,u_f_d,g);
u_f = -[100 100 10 10]*(q -q_d) + u_f_d;
ff = ff_cartpole(x,th,dx,dth,m_cart,m_mass,l,u_f,g);
M = M_cartpole(x,th,dx,dth,m_cart,m_mass,l,u_f,g);
ddq = M\ff;
dq = [q(3:4);
ddq];Without PD control on error term¶
With PD control on error term¶